
Embedded control system design usually begins with system modelling in softwares like Matlab and Simulink, and simulated in non real time simulations. This plant model is a non real time detailed dynamic model on which simulations and analysis is done. The same model is then auto code generated to flash on the particular microcontroller with modifications to run in real time.
[stm_quote box_color=”custom” quote_text=”” img_size=”48×48″ quote=”CONTROL SYSTEM DESIGN” box_color_custom=”#ffffff”]
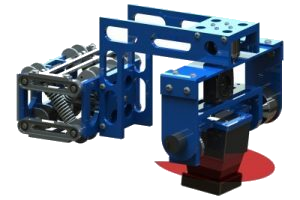
COMPLEX MOTION CONTROL
Controlling of multiple motors, each governing an axis of the platform for a customer. The system was developed to validate various sensors before being put into real use where a sensor failure might cause catastrophic accidents.
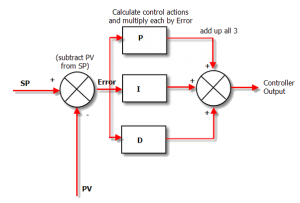
SIMPLE PID CONTROL
Not all applications require complex algorithms and state space modelling. Most of the simple applications where only a few variables are to be controlled can be fulfilled by implementing PID control and using mid range microcontrollers.